

Controladores / Drivers

Driver para Motor Paso A Paso 1A – A4988 Genérico
Disponibilidad:
6 disponibles
$8,500
6 disponibles
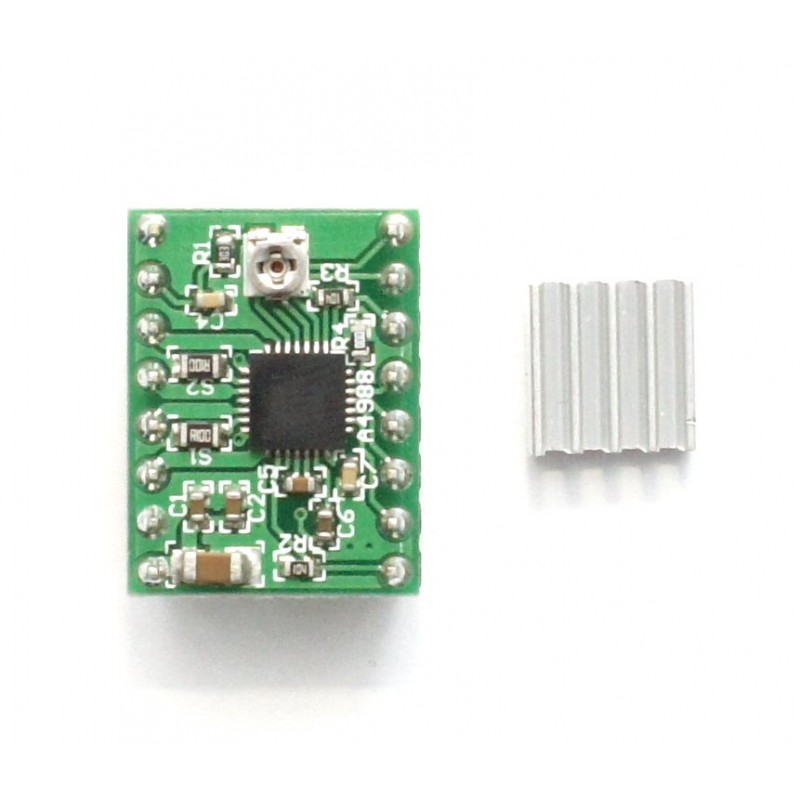
Este producto incorpora el chip de Allegro A4988 de en una placa de fácil conexión y utilización. Es usado como controlador de motores paso a paso de hasta 2 A de corriente por bobina (ver consideraciones de disipación de calor en el datasheet).
Características
- Cinco resoluciones diferentes: paso completo, medio paso, un cuarto de paso, un octavo de paso, y un dieciseisavo de paso.
- Control de corriente ajustable que permite ajustar la salida de corriente máxima con un potenciómetro, que le permite utilizar tensiones superiores a la tensión nominal del motor paso a paso para lograr mayores tasas de paso.
- Protección por sobrecalentamiento térmico, cierre por baja tensión, y protección por sobrepico de corriente.
Algunos motores paso a paso unipolar (por ejemplo, aquellos con seis u ocho cables) pueden ser controlados por este controlador como motores paso a paso bipolar. Para obtener más información, ingrese a la página oficial. Motores unipolares de cinco cables no se pueden utilizar con este controlador.
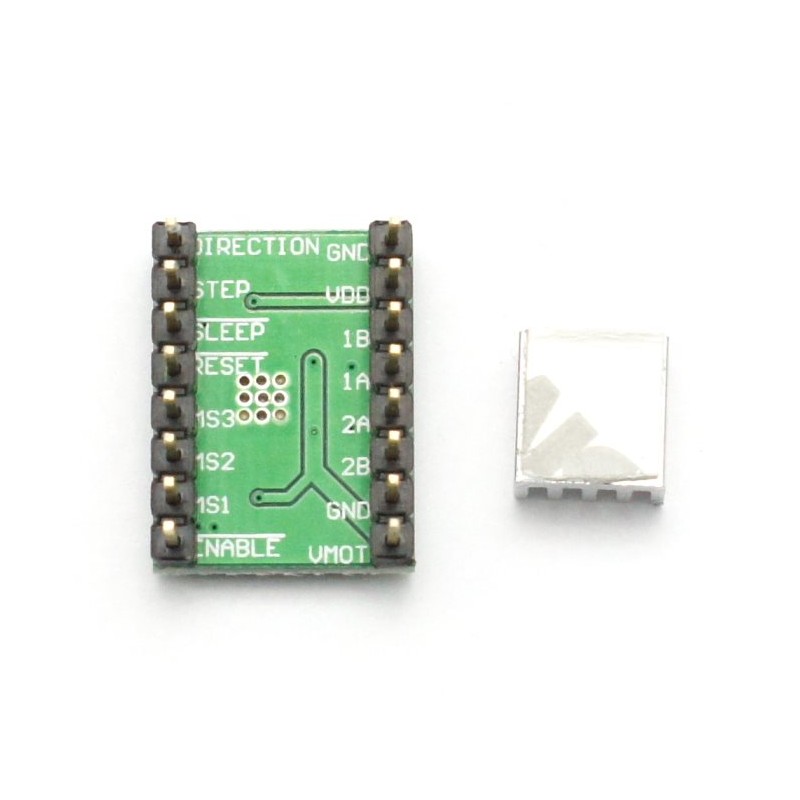
Modo de conexión
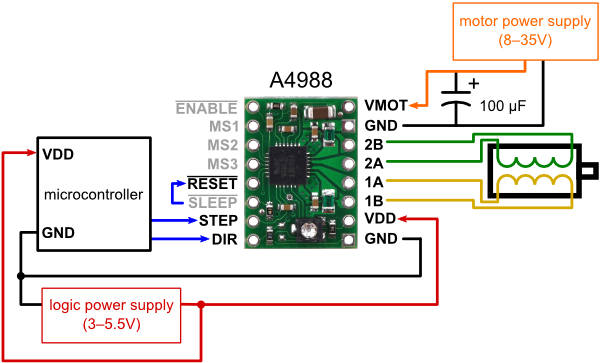
Alimentación
El controlador requiere una tensión de alimentación lógica (3-5,5 V) que se conecta a través de los pines VDD y GND y una tensión de alimentación del motor (8-35 V) para ser conectada a través de VMOT y GND. Estos suministros deben tener condensadores de desacoplamiento adecuados cerca a la placa, y que deben ser capaces de entregar las corrientes esperadas (picos de hasta 4 A para el suministro del motor).
⚠️ Advertencia: Esta placa utiliza condensadores cerámicos de baja ESR, lo que puede causar su destrucción con picos de voltaje, especialmente cuando se utiliza cables de poder muy largos. Bajo las condiciones adecuadas, estos picos pueden exceder el voltaje nominal máximo de 35 V para el A4988 y causar daños permanentes en la placa, incluso cuando la tensión de alimentación del motor es baja como 12 V. Una forma de proteger la placa de estos picos es poner un condensador grande electrolítico (por lo menos 47 mF) entre los pines de alimentación del motor (VMOT) y tierra en algún lugar cerca de la placa.
Conexiones al motor
Motores paso a paso de cuatro, seis y ocho pueden ser controlador por esta placa A4988 si están conectados correctamente. Aquí se explica los cableados adecuados en detalle.
⚠️ Advertencia: La conexión o desconexión de un motor paso a paso, mientras la tarjeta se alimenta puede provocar la destrucción de la misma.
Tamaño del paso y micropaso
Los motores paso a paso normalmente tienen una especificación de tamaño de paso (por ejemplo, 1,8º o 200 pasos por revolución). Un controlador de microstepping tal como el A4988 permite resoluciones más altas, permitiendo ubicaciones en paso intermedio, que se consiguen por la activación de las bobinas con los niveles de corriente intermedios. Por ejemplo, controlando un motor paso a paso de 200 pasos por revolución en el modo de paso por cuartos (quarter-step) dará 800 micropasos por revolución mediante el uso de cuatro niveles de corriente diferentes.
La resolución (tamaño de paso) puede ser seleccionada mediante los pines MS1, MS2, MS3 que permiten cinco resoluciones diferentes de paso de acuerdo con la tabla de abajo. MS1 y MS3 tienen una resistencia pull-down interna de 100 kΩ y MS2 tiene una resistencia pull-down interna 50kΩ, así que dejar estos tres pines al aire resultará en el modo de paso completo (full-step mode). Para que los modos de micropasos funcionen correctamente, el límite de corriente debe ser lo suficientemente bajo (véase más adelante). De lo contrario, los niveles intermedios no se mantienen correctamente, y el motor se saltará micropasos.
| MS1 | MS2 | MS3 | Resolución de micropaso |
|---|---|---|---|
| Bajo | Bajo | Bajo | Paso completo (Full step) |
| Alto | Bajo | Bajo | Medio paso (Half step) |
| Bajo | Alto | Bajo | Un cuarto de paso (Quarter step) |
| Alto | Alto | Bajo | Un octavo de paso (Eighth step) |
| Alto | Alto | Alto | Un dieciseisavo de paso (Sixteenth step) |
Control
Cada pulso de entrada escalón corresponde a un micropaso del motor paso a paso en la dirección seleccionada por el pin DIR. Tenga en cuenta que los pines de STEP y DIR no están conectados a ningún voltaje determinado, por lo que no debe dejar ninguno de estos pines al aire en su aplicación. Si desea que su motor gire en una sola dirección, puede conectar DIR directamente a VCC o GND. El chip tiene tres entradas diferentes para el control de sus múltiples estados de energía: RST, SLP, y EN. Para obtener más información acerca de estos estados de energía, consulte la hoja de datos (datasheet). Tenga en cuenta que el pin RST es flotante, y si usted no lo está usando, se puede conectar al pin SLP adyacente en el PCB para llevarlo a estado alto y activar la tarjeta.
Limitación de corriente
Para lograr altas tasas de paso, la alimentación del motor es típicamente mucho más alta de lo que sería admisible sin limitación de corriente activa. Por ejemplo, un motor paso a paso típico podría tener una clasificación de corriente máxima de 1 A con una resistencia de la bobina 5Ω, lo que indicaría una alimentación del motor máximo de 5 V. El uso de un motor de este tipo con 12 V permitiría tasas de paso superiores, pero la corriente debe estar activamente limitada a menos de 1 A para evitar daños en el motor.
El A4988 soporta limitación activa de corriente, permitiendo mediante un potenciómetro ajustar el límite de corriente. Una forma de establecer el límite de corriente es poner el controlador en modo paso completo y medir la corriente que circula a través de una sola bobina del motor sin activar la entrada STEP. La corriente medida será 0,7 veces el límite actual (ya que ambas bobinas están siempre activas y limitadas a 70% del ajuste de límite de corriente en el modo de paso completo). Tenga en cuenta que el cambio de la tensión de la lógica, Vdd, a un valor diferente, cambiará el ajuste de límite de corriente porque el voltaje de referencia “ref” es una función de Vdd.
Otra forma de establecer el límite de corriente es medir el voltaje en el pin “ref” y calcular el límite de la corriente resultante (las resistencias de detección actuales son 0.05Ω). La tensión del pin ref es accesible en una pista que está en un círculo en la parte inferior de la serigrafía de la tarjeta. El límite de corriente se refiere a la tensión de referencia de la siguiente manera:
Límite de corriente = VREF × 2,5
Así, por ejemplo, si el voltaje de referencia es 0,3 V, el límite de corriente es de 0,75 A. Como se mencionó anteriormente, en el modo de paso completo, la corriente a través de las bobinas se limita a 70% del límite de corriente, por lo que para conseguir una corriente completa de bobina de 1 A, el límite de corriente debe ser de 1 A/0.7 = 1.4 A, que corresponde a una VREF de 1.4 A/2.5=0.56 V. Véase la hoja de datos A4988 para más información.
🗈 Nota: La corriente de la bobina puede ser muy diferente de la corriente de alimentación, por lo que no debe utilizar la corriente medida en el suministro de energía para fijar el límite de corriente. El lugar apropiado para poner el medidor de corriente es en serie con una de las bobinas del motor paso a paso.
Más información:
| Peso | 3 g |
|---|---|
| Dimensiones | 1 × 2 × 2.1 cm |
Basado en 0 reseñas
Solo los clientes registrados que hayan comprado este producto pueden dejar un comentario.




Todavía no hay comentarios.