
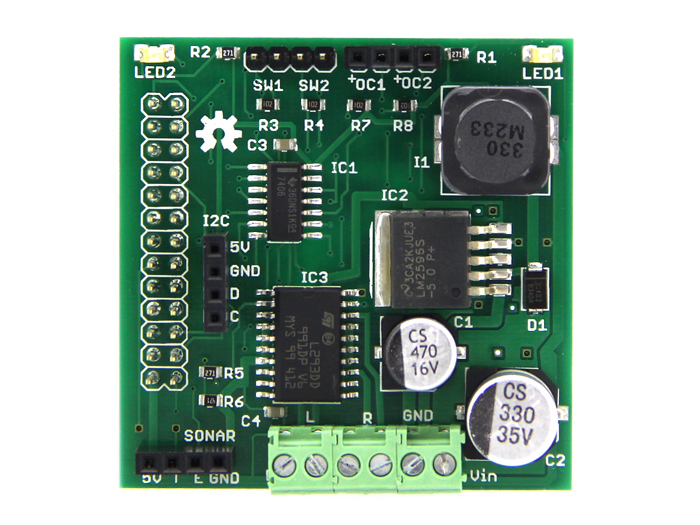


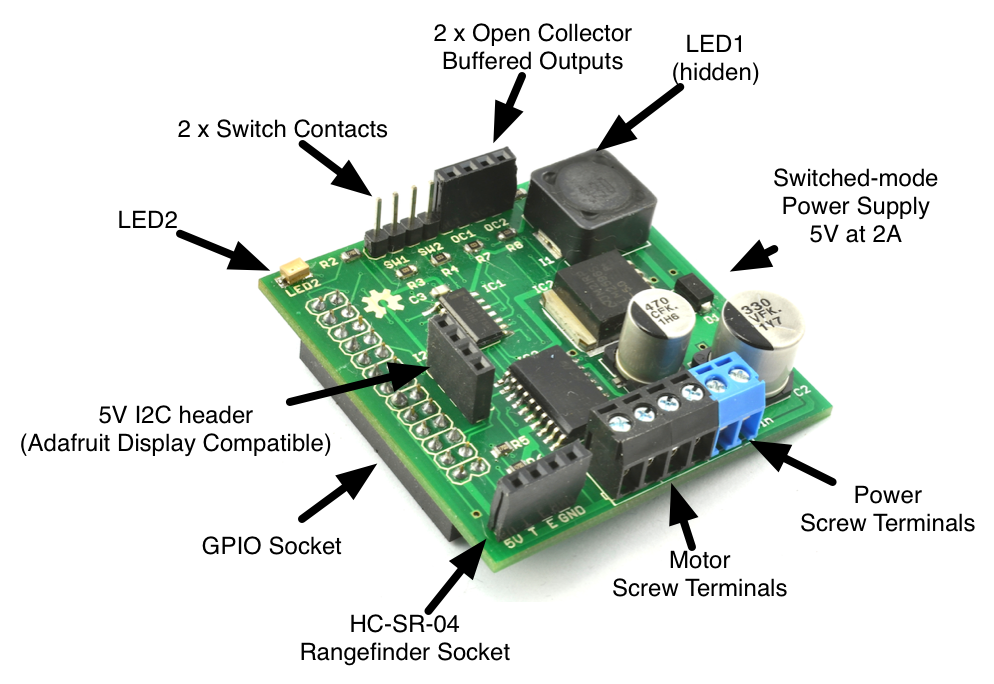
La RaspiRobot Board V2 es una tarjeta que sirve como interfaz para conectar motores a Raspberry Pi,que incluye una fuente de alimentación conmutada para el suministro de energía a su Raspberry Pi mediante baterías.
Características:
- Librería de Python completa y fácil de usar
- Control bidireccional de dos motores (L293 chip)
- Variable (PWM) para control de potencia. Esto le permite controlar tanto la velocidad de los motores de forma independiente y también utilizar motores de voltaje más bajo que el voltaje de su batería.
- Alimentar el Raspberry Pi con hasta 2A utilizando una fuente de alimentación conmutada – Correr el Raspberry pi completamente cargado y el Robot con 6 x pilas AA
- Directamente compatible con el sensor de distancia de ultrasonido HC-SR-04. Sólo tiene que conectarlo.
- Header I2C 5V, pines compatibles con pantallas Adafruit
- Dos salidas de colector abierto buffer
- Dos LEDs indicadores
- Terminales de tornillo para motores y la batería
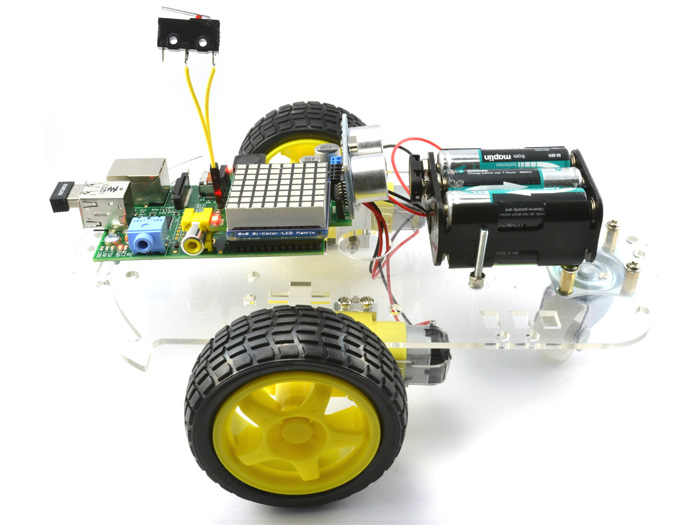
¿Cómo funciona?
El siguiente diagrama muestra cómo se utiliza un RaspiRobotV2 (RRB2). El RRB2 se alimenta de una batería que tiene que ser entre 6 y 12 V DC. Aunque el uso de 4 pilas AA en teoría puede proporcionar 6V, en realidad el voltaje de la batería por lo general va a caer rápidamente por debajo, por lo que es mejor utilizar al menos 6 x pilas AA, ya sea baterías recargables o regulares. Un paquete de baterías LiPo de 7.2V también funcionará bien.
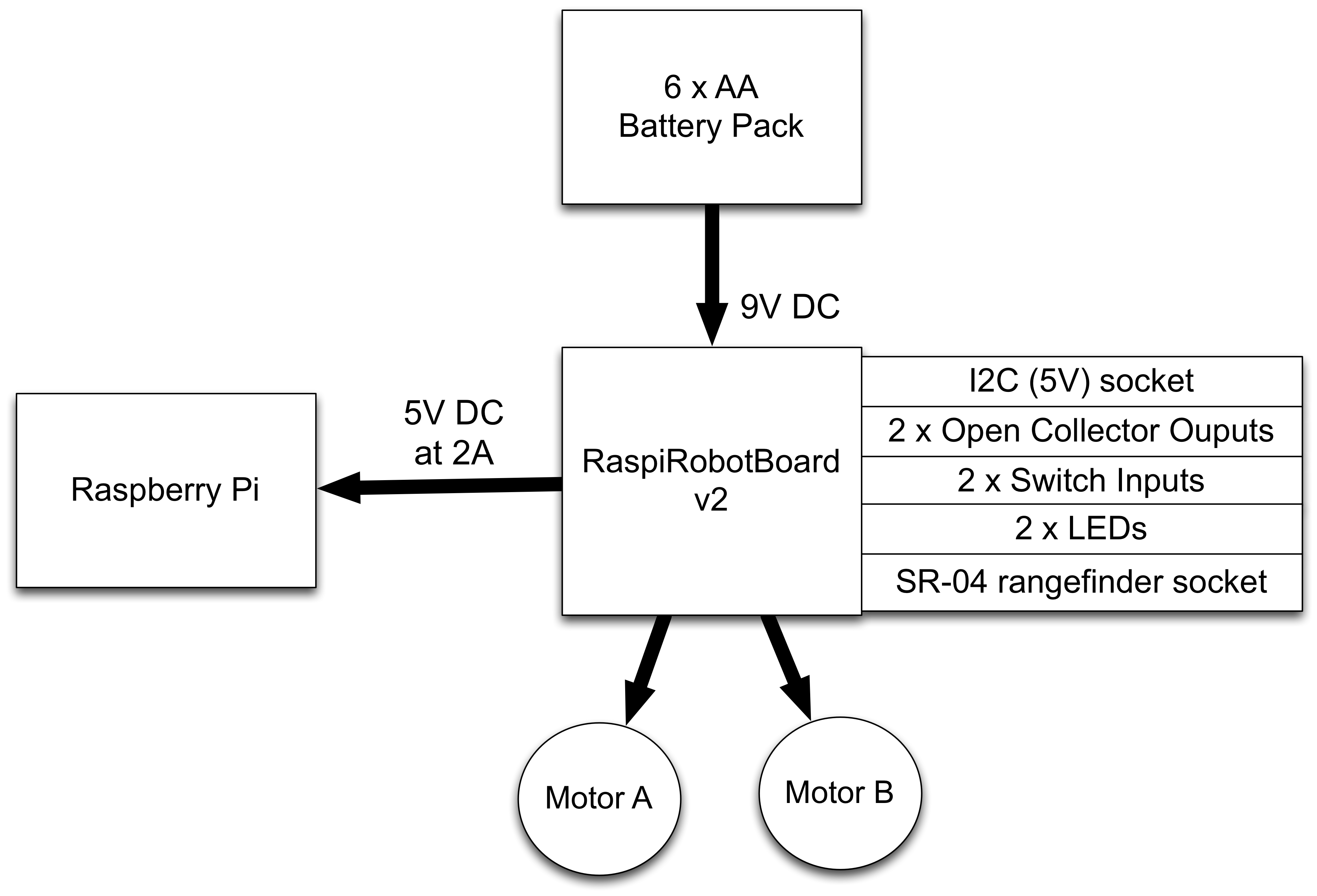
Tenga en cuenta que usted no necesita una fuente de alimentación independiente para el Raspberry Pi. El RRB2 proporcionará 5V 2A con facilidad a el Raspberry Pi y los motores.
Tenga en cuenta que un motor de 6V suele funcionar muy bien a 5V.
Nota: Los motores, chasis de robot y Raspberry Pi no están incluidos.
Más información:
Basado en 0 reseñas
Solo los clientes registrados que hayan comprado este producto pueden dejar un comentario.

Todavía no hay comentarios.