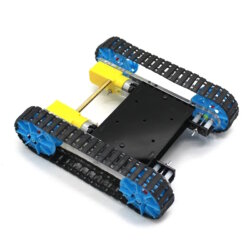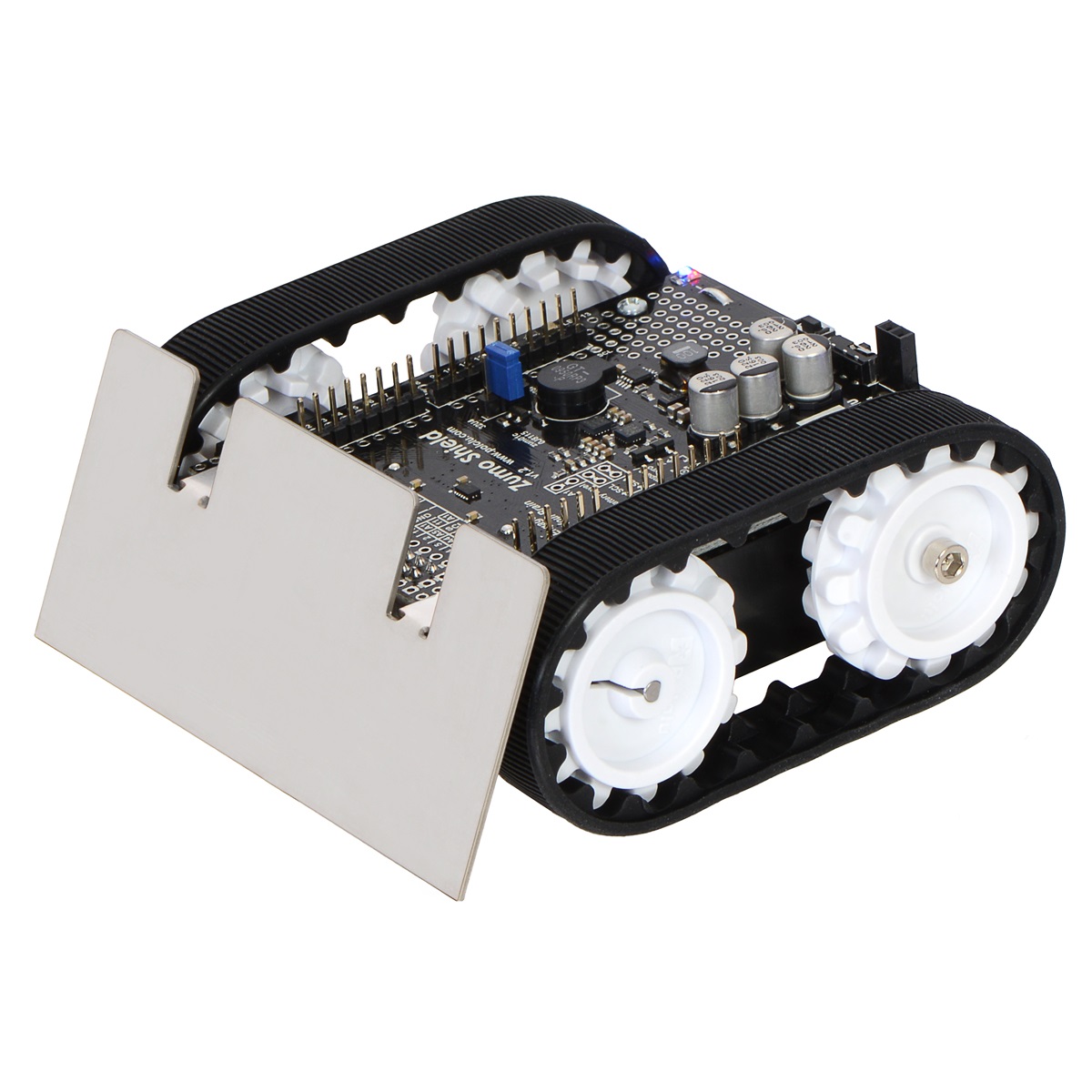
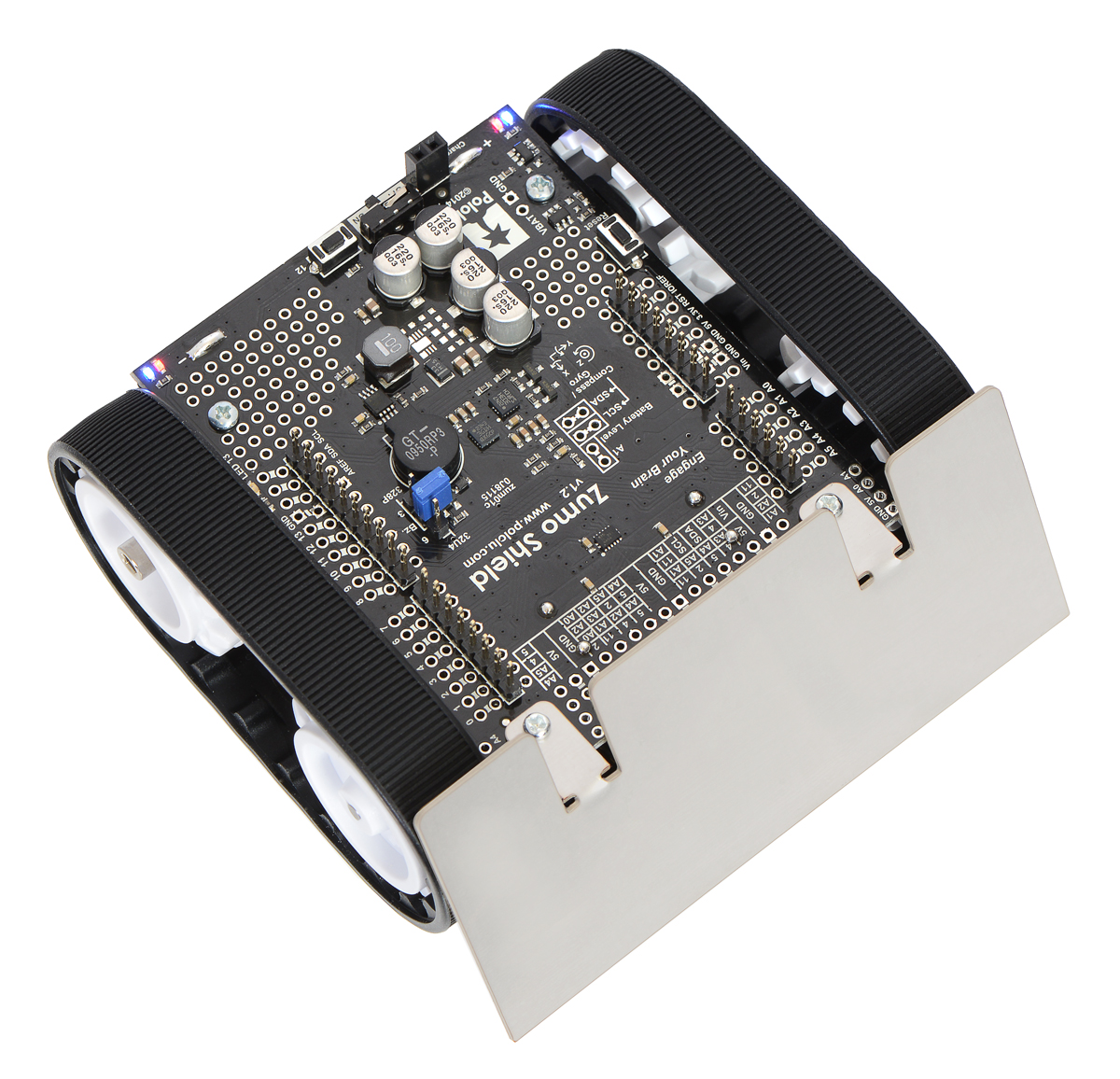
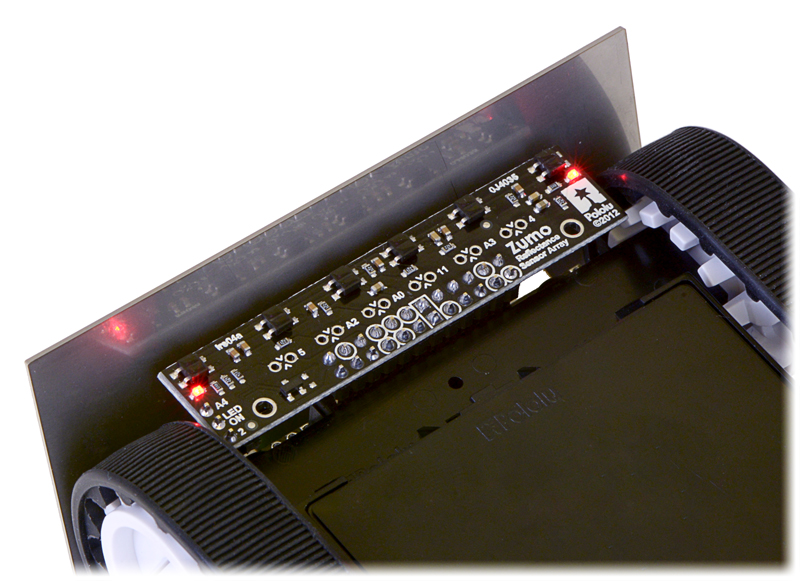
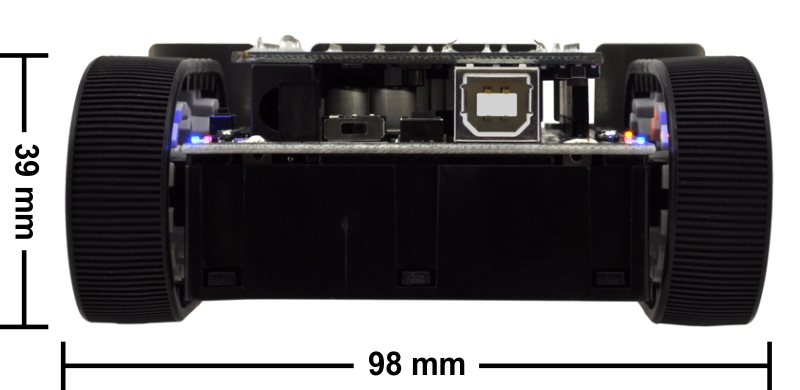
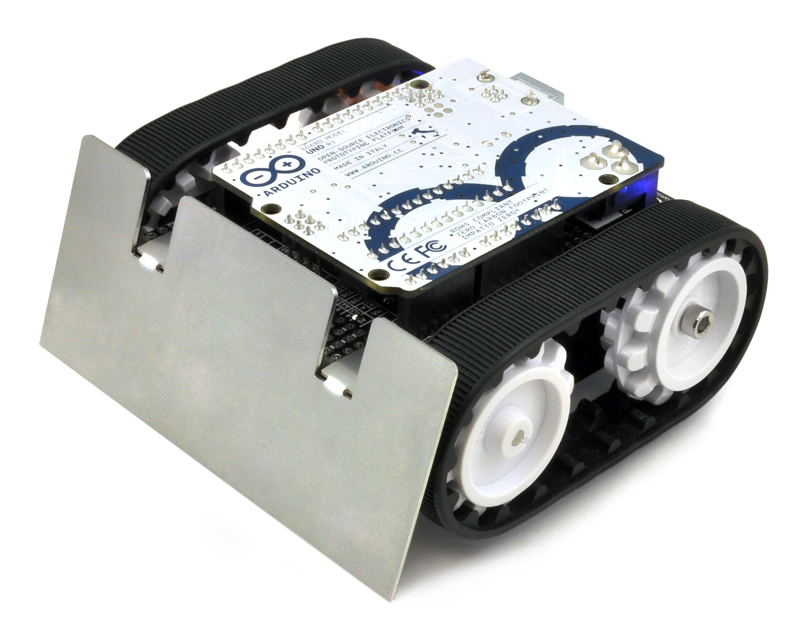

El Robot Sumo es una plataforma de robot de bajo perfil diseñada para uso con un Arduino (o dispositivo compatible, como un Teensy) como su controlador principal. Mide menos de 10 cm de cada lado y tiene un peso aproximado de 300 g con un Arduino Uno y baterías (165 g como se entrega), por lo que es a la vez lo suficientemente pequeño y ligero como para calificar para las competiciones de mini-sumo. Utiliza dos motorreductores HP de metal de 75: 1 para impulsar las bandas de rodadura, proporcionando suficiente torque y una velocidad máxima de aproximadamente 2 metros por segundo (60 cm/s), lo que hace que sea mucho más ágil que robots competidores como el Solarbotics Sumovore y el SumoBot Parallax mientras que ofrece un gran control. El robot Sumo incluye una cuchilla o pala de 0,036″ de espesor cortada con láser de acero inoxidable montada en la parte delantera del chasis para empujar alrededor objetos al igual que otros robots, y una matriz de sensores de reflectivos montados a lo largo del borde frontal del Sumo (detrás de la hoja Sumo) que permite al robot detectar características en el suelo delante de él, tales como líneas de seguimiento o bordes para evitar.
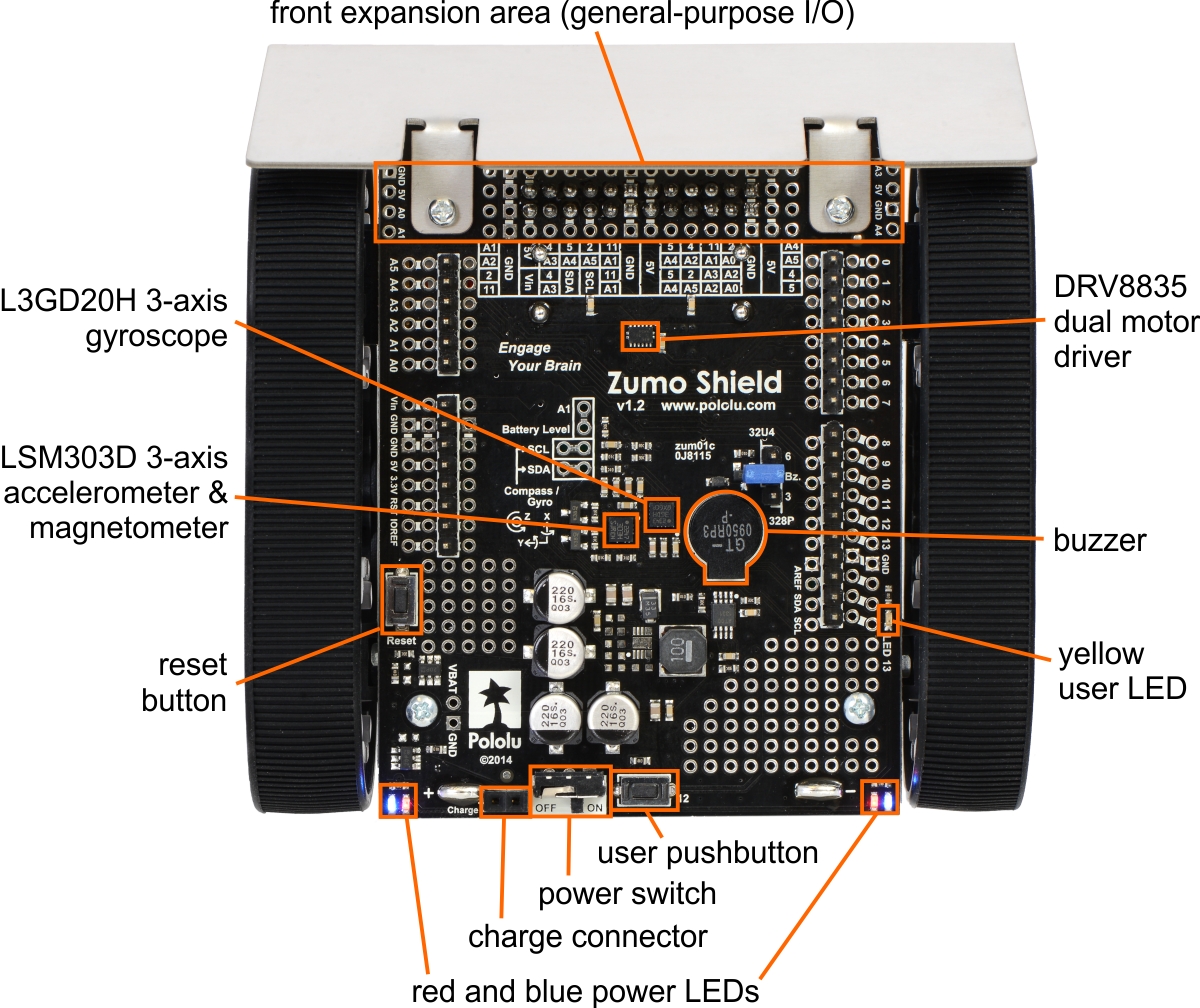
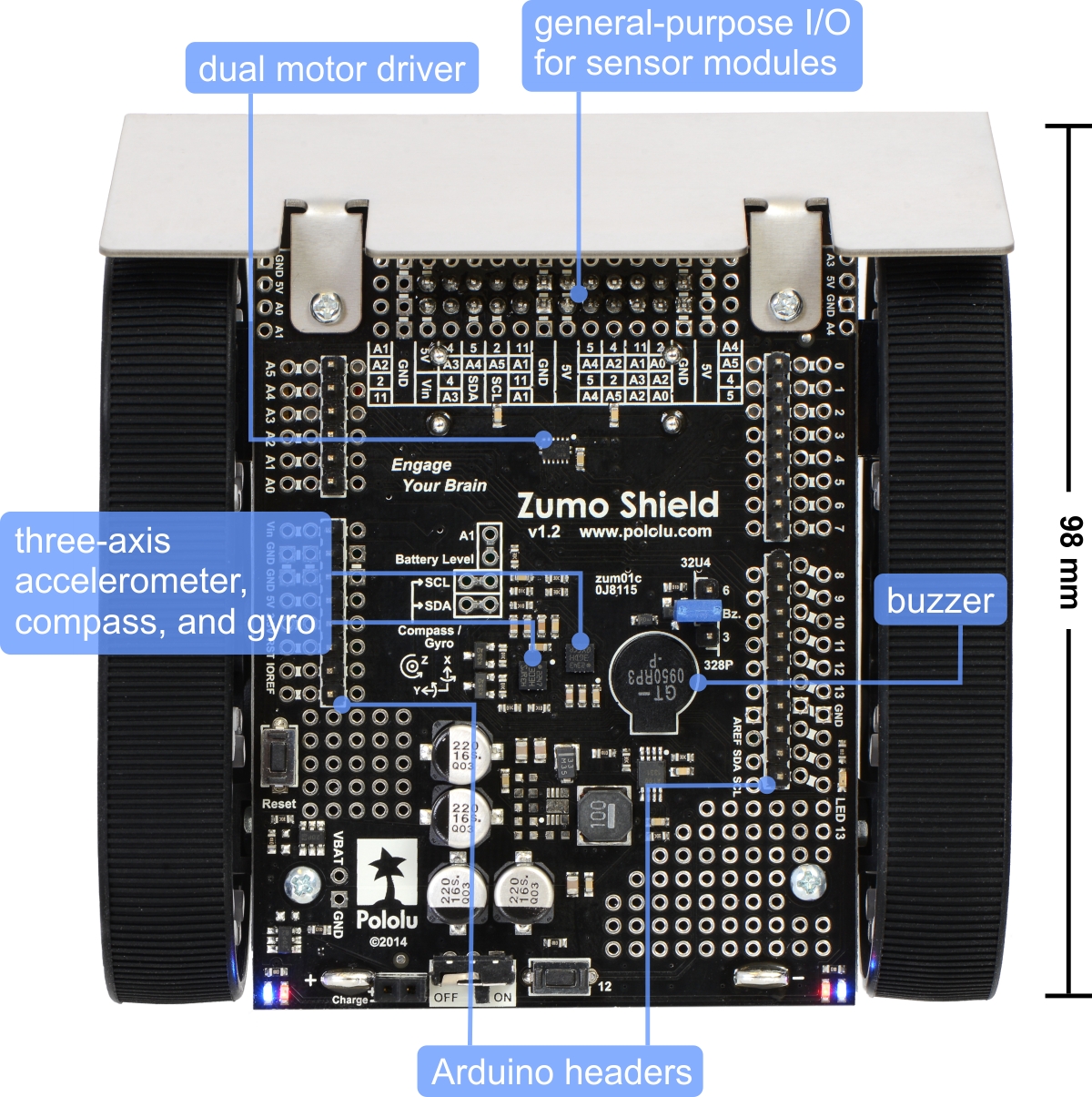
La board de control del Robot Sumo es esencialmente un shield para Arduino Uno o Arduino Leonardo, cada uno de los cuales puede ser conectado directamente encima del shield boca abajo. (No es compatible con el Mega Arduino o Due, pero se puede utilizar con Arduinos mayores que tienen el mismo factor de forma que el Uno, como el Duemilanove.) El escudo incluye controladores de motor duales, un buzzer para la reproducción de sonidos simples y música, un pulsador de usuario, y un acelerómetro de 3 ejes, brújula y giroscopio para detectar impactos y el seguimiento de la orientación. También conecta el voltaje de la batería mediante un regulador tipo Boost (Elevador) para alimentar el Arduino y extiende las líneas de E/S del Arduino, el botón de reset y un LED para facilitar el acceso del usuario para reiniciar y para dar cabida a sensores adicionales.
Nuestras librerías Sumo para Arduino hacen que sea fácil interactuar con todo el hardware integrado, y nos ofrecen una serie de programas de ejemplo que muestran cómo utilizar la matriz de sensores reflectivos, pulsador, buzzer y motores del Sumo. También hemos escrito una librería de Arduino básica para el LSM303 y una librería L3G para Arduino que hacen que sea más fácil trabajar con el acelerómetro y magnetómetro de 3 ejes LSM303D incorporado y el giroscopio de 3 ejes L3GD20H .
El robot se envía como se muestra en la imagen principal del producto; no se requiere ningún montaje o soldadura. Un Arduino apropiado (o controlador compatible) y cuatro baterías AA son necesarios pero no incluidos.
Características
- Motorreductores HP 75: 1 metálicos que ofrecen una buena combinación de velocidad (hasta 2 metros por segundo), poder y control.
- 6 sensores reflectivos IR montados que permite al Sumo detectar contrastes en la reflectividad directamente debajo cuchilla o pala, que se pueden utilizar para el seguimiento de líneas o detección de bordes (por ejemplo, el área blanca externa de un anillo de sumo o el borde de una mesa).
- Driver o controladores DRV8835 de motores integrados capaces de suministrar suficiente corriente para dos motorreductores de alta potencia.
- Piezo zumbador para reproducir sonidos simples y música. El zumbador es controlado por una de las salidas PWM del Arduino, así que se pueden generar tonos en el fondo sin ocupar una gran cantidad de potencia de procesamiento.
- Acelerómetro de 3 ejes y magnetómetro de 3 ejes integrado LSM303D que puede ser utilizado para detectar impactos. La brújula recibe una gran cantidad de interferencia de los motores, baterías, PCB, y sus alrededores, por lo que generalmente no es útil para una navegación precisa, pero hemos encontrado que con la calibración adecuada puede ser utilizado para medir la orientación aproximada en muchos entornos.
- Giroscopio de 3 ejes integrado L3GD20H que puede ser utilizado para rastrear la rotación.
- Pulsador de usuario opcional en el pin 12.
- Regulador elevador 7.5 V para alimentar el Arduino a partir de 4 pilas AA del Sumo.
- Facilidad de acceso a las líneas de E/S del Arduino, el LED de usuario pin 13, y la línea de reset Arduino.
- Áreas de creación de propósito general para prototipos y un área de expansión en la parte frontal para la conexión de sensores adicionales.
- Compatible con el Arduino Uno R3 y Arduino Leonardo. También se puede utilizar con Arduino mayores que tienen el mismo factor de forma, como el Duemilanove.
- Librerías para Arduino y código de ejemplo.
- Guía de uso detallada.
Accesorios requeridos (no incluidos)
- Un Arduino o tarjeta de control compatible. El shield Sumo trabaja con Arduino Uno y Arduino Leonardo. No es compatible con el Mega Arduino o Due, pero se puede utilizar con Arduinos mayores que tienen el mismo factor de forma que el Uno, como el Duemilanove. (Otros controladores compatibles con Arduino podrían trabajar con el robot Sumo, pero el soporte para ellos será limitado y podrían requerir modificaciones;. Un ejemplo podría ser la tarjeta Freescale FRDM-KL25Z)
- Cuatro pilas AA. El chasis Sumo funciona con pilas alcalinas y de NiMH, aunque se recomienda NiMH recargables.
Más información:
- Guía de usuario
- Manual de usuario para shield Sumo de Arduino
- Diagrama de shield Sumo de Arduno v1.2
- Hoja de datos de driver DRV8835
- Librerías para Arduino del Robot Sumo
- Página Oficial del producto